それぞれのセンサーがデータを取得するタイミングは異なっています。センサーフュージョンを行う場合、特に車体が動いている場合は、センサーがデータを取得するタイミングも同期させる必要があります。
A) 原理
同じ時間に設置しても短期間で差分が発生します。このずれが重要問題になっています。(Clock Drift)
原因はそれぞれのクロックが示す時間が少しずれているためです。
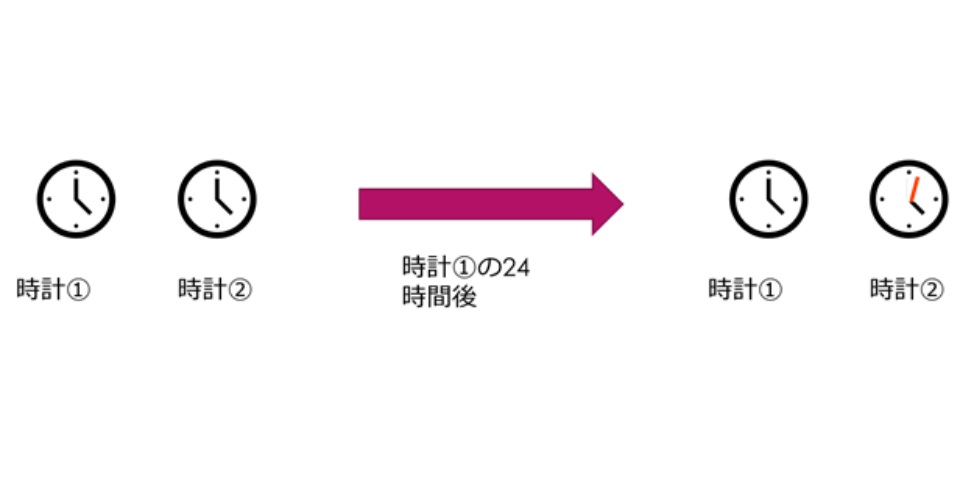
時刻同期とは、機器毎のシステムクロックをマスタークロックと同期させる事です。これにより、センサー毎の時間ずれがなくなり、全てのセンサーが同じ時刻でデータを取得できるようになります。
Autosarは時刻同期に対応しています。一般的にはGNSSもしくはNTPやPTPで時刻同期を行います。
時刻同期は基本的にどんな方法でも同じ原理で動作します。
一つの高精度の時間のソースに対して、(GNSS若しくは時間のサーバ)時刻同期依頼を送信します。時刻依頼の頻度は手法により変わります。(NTPは16s~64s, PTPは1s)
NTP/PTPの概要構成は以下です。
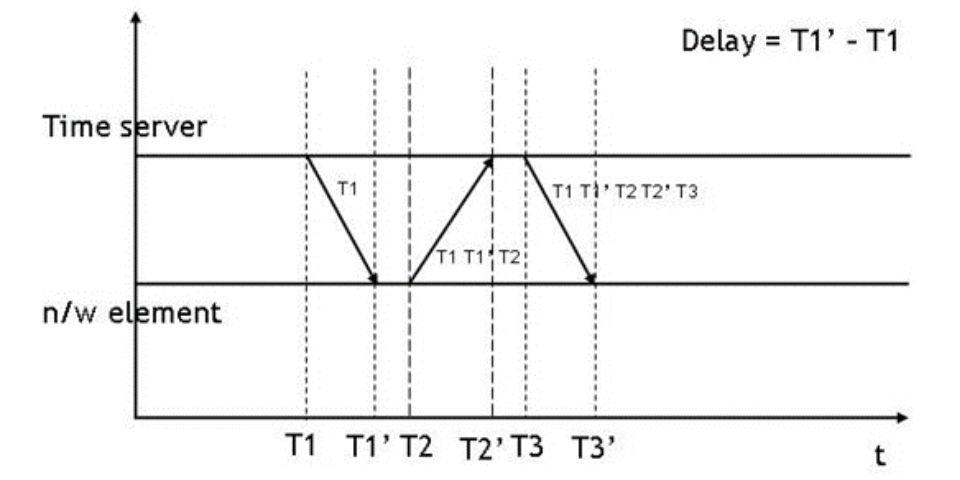
マスタはT1のタイミングに同期のメッセージを送ります。それぞれのクロックはT1’で受信しています。同期のレスポンスはT2から送信されており、マスタがT2’に受信しています。
それぞれのT1, T1’, T2, T2’に送受信時間(delay)及びクロック同士のオフセット(offset)が含まれています。変数から以下の式の組み合わせがあります。
T’1 – T1 = offset + delay と T2’-T2 = -offset + delay
組み合わせる事により、送受信時間を無くしてクロック同士のオフセットを計算することができます。
Offset = 0.5 * (T’1 – T1 – T2’ + T2)
B) 時刻同期の性能及び実装方法
➡NTP
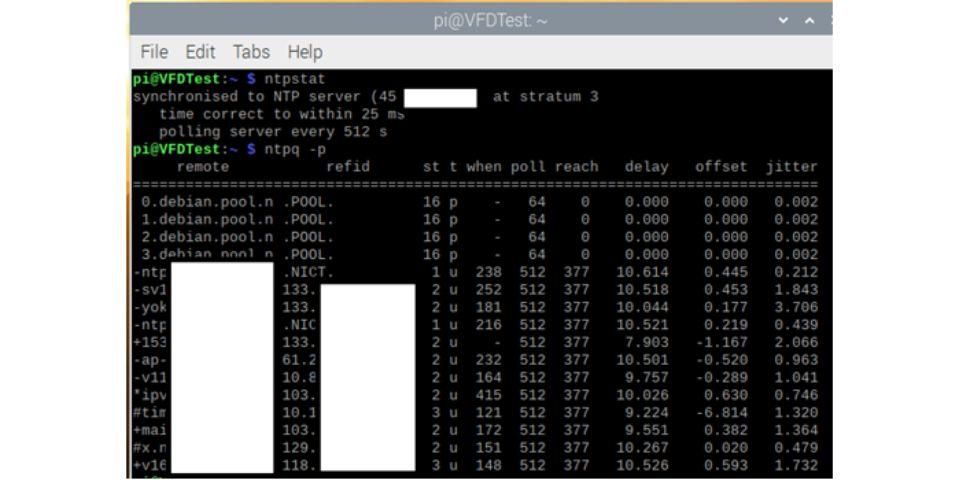
Ubuntu, Raspberry Pi等のLinuxはインターネットに接続するとNTP が動作し、自動的に時刻同期を行います。
有線で24時間接続した時の時刻同期精度は1ms未満です。

NTPを自動運転で使用するためには、インターネットアクセスが必要なので、無線を使用する必要があります。無線を使用すると、有線よりも干渉及び信号ロスの影響で大きな時刻精度のばらつきが発生しています。
無線を使用した際のNTP時刻同期精度を実験したところ、24時間接続後の時刻同期精度は25ms未満でした。
24時間後の時刻同期精度を計測した理由は、時間を置く事により時刻同期精度が向上するためです。
➡PTP
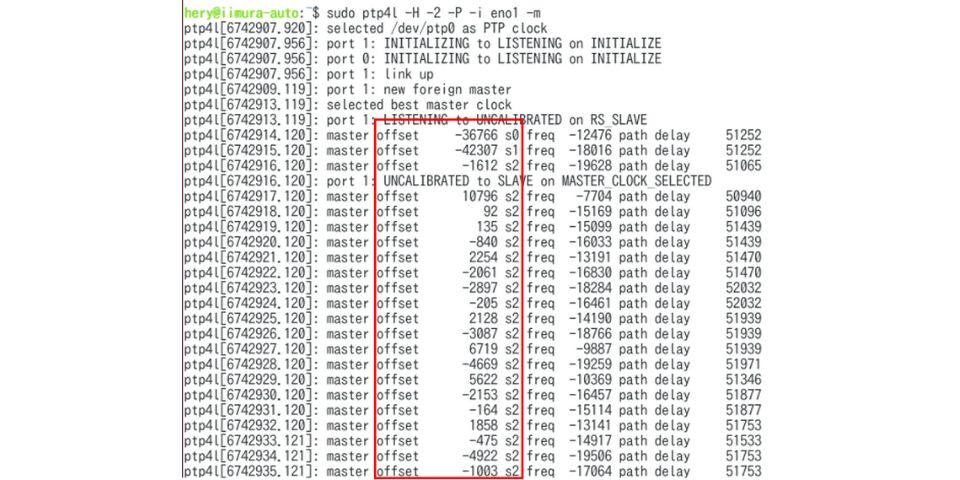
ハードウエアのタイムスタンプを使う事により、OSの処理時間誤差を減らすことができます。このため、PTP をサポートするためにはハードウエアでのサポートも必要になります。
PTPは自動運転に最適です。一つのPCがサーバになり、他のセンサーとPCに高精度の時刻同期を行います。PTPをサポートしているLiDARもあります。
例:Cepton社はUDPでPTPを実装しています。
Cepton Sensor Communication Specifications
PC同士の有線でPTPを実装した場合、その誤差は数μsです。以下はPC間の時刻誤差をns単位で表示しています。
➡GNSS
GNSSは位置情報だけでなく時刻情報も送信しています。
Ubuntu及びRhaspberry PiにはGNSSの動作に必要なデーモン(gpsd)が既にインストールされているため、GPSデバイスを接続しデーモンを起動する事で使用可能になります。

GNSSの時刻情報を利用したLiDARもあります。
例:Ouster社GNSSをUART経由で入力し時刻同期を行います。
datasheet-rev7-v3p0-os0.pdf (ouster.io)
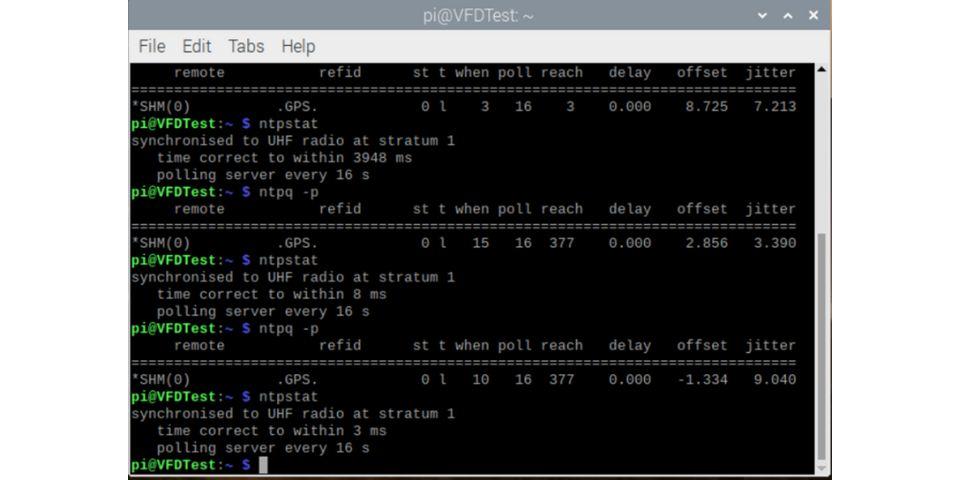
実験の結果では、受信機が動いてない状態及び受信が安定したとき【起動の1時間後】に最大の3msの精度が出ます。
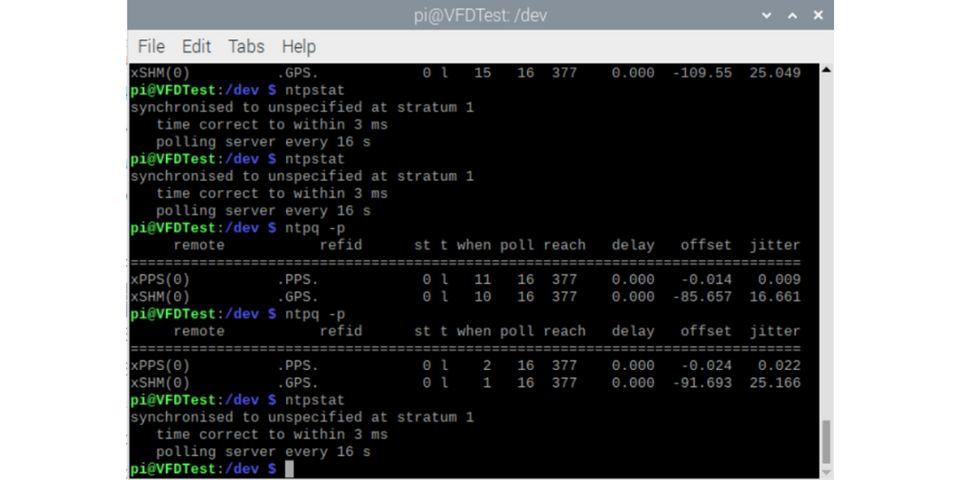
➡GNSS+PPS
PPSはPulse per Secondの略です。
正確に1秒に1パルスを出力します。(nsの精度)

PPSが使用される理由は、GNSS 信号の遅延のばらつきを防ぐためです。GNSSの信号がGNSS レシーバまで届く間に、反射や雲による信号の吸収等があった場合、遅延が一定ではなくなるためです。
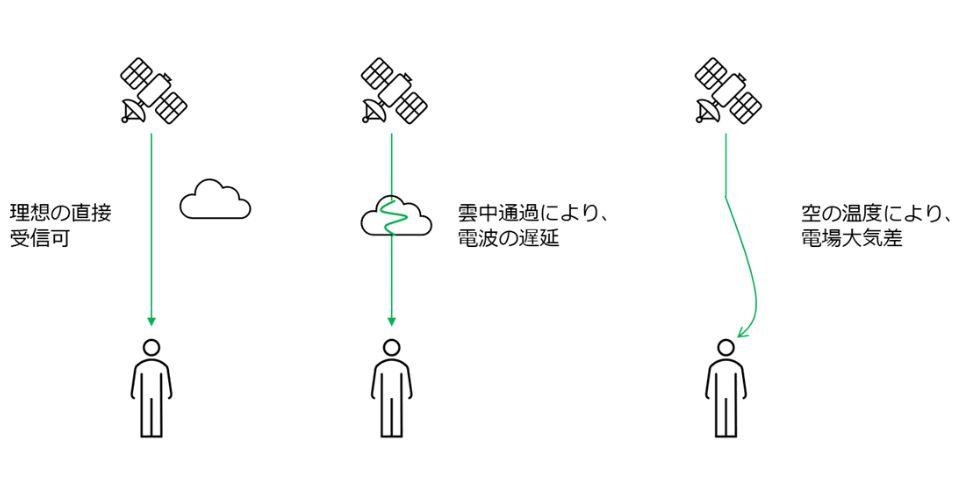
空中の誤差を減らすために、受信機に高性能のパルスを出力するようにしています。
GNSSから日付時秒を頂いて、PPSからms、usを正確に計ります。
時間を持ってないセンサーならPPSでタイムスタンプの同期を実装することができます。
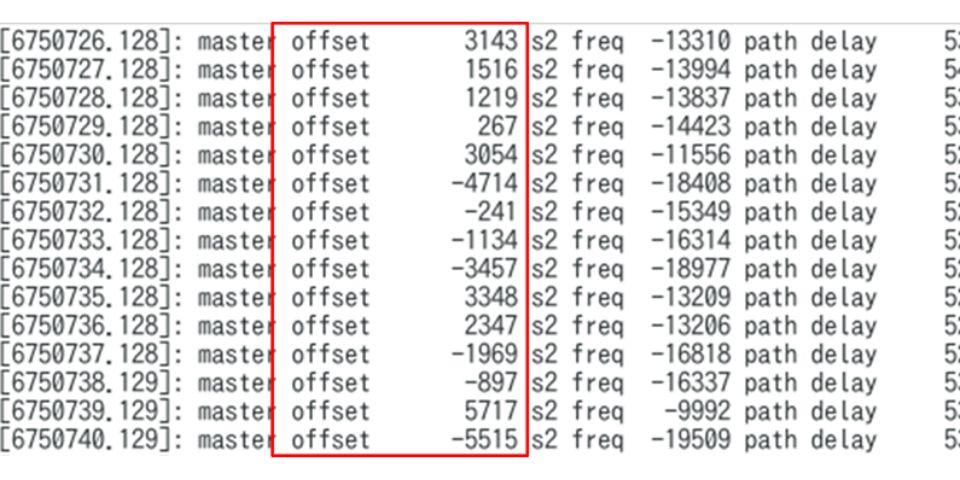
GNSS の時刻精度は、起動時にジッタの影響で大きくなる事に注意してください。弊社でRasberry pi で実験したところ、はじめはオフセット3msec だったものが一定時間経過後オフセットは24usec に落ち着きました。
時刻同期のオフセットはジッタを持っていますので、常に変化します。その変化は十分な時間が経過されるとある程度安定します。このためシステムとして許容量の誤差になるかどうか十分検討する必要があります。
C) 時刻同期からのセンサーフュージョン影響
障害物検知の際複数のセンサーの時刻同期が非常に重要です。
自己位置の誤差も入りますが、センサー同士だけで時刻のずれは障害物の位置の誤差及び障害物の大きさ検知の誤差になります。
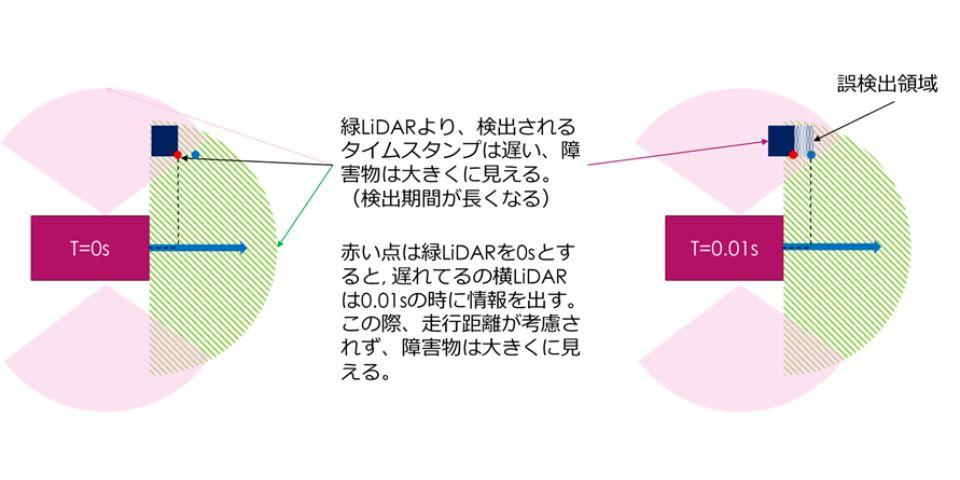
特にセンサーフュージョンの場合、ECU毎のクロックのずれ等で、障害物の見え方が複雑に変化します。
具体的にGNSSの位置ずれを無視して、センサー同士のみの10msのずれで;走行速度の50km/hなら約14cmを発して、同等の位置ずれが発生しています。
このずれは走行方向と同じの場合ですが、センサーのFOVの端っこ及び回転中ならこれ以上のエラーが出てきます。
from "構成" - Google ニュース https://ift.tt/JX2hYkF
via IFTTT
Bagikan Berita Ini














0 Response to "自動運転におけるセンサーフュージョン構成 - スマートシティ/モビリティ - マクニカ"
Post a Comment